
Search the Forum
'светодиодная лента'.
Found 1 result
-

Цветомузыка из светодиодной ленты. Цветомузыка на светодиодах
ColorPlay posted a topic in (RU) ФОРУМ ОСВЕЩЕНИЕ
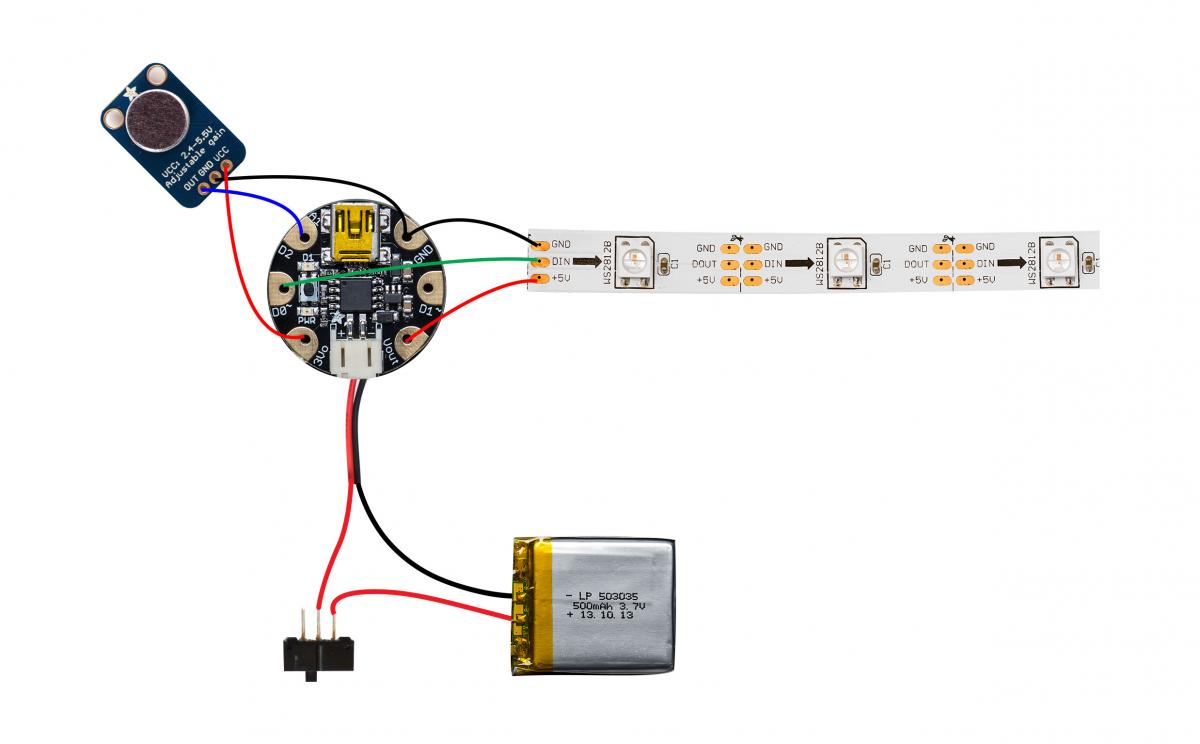
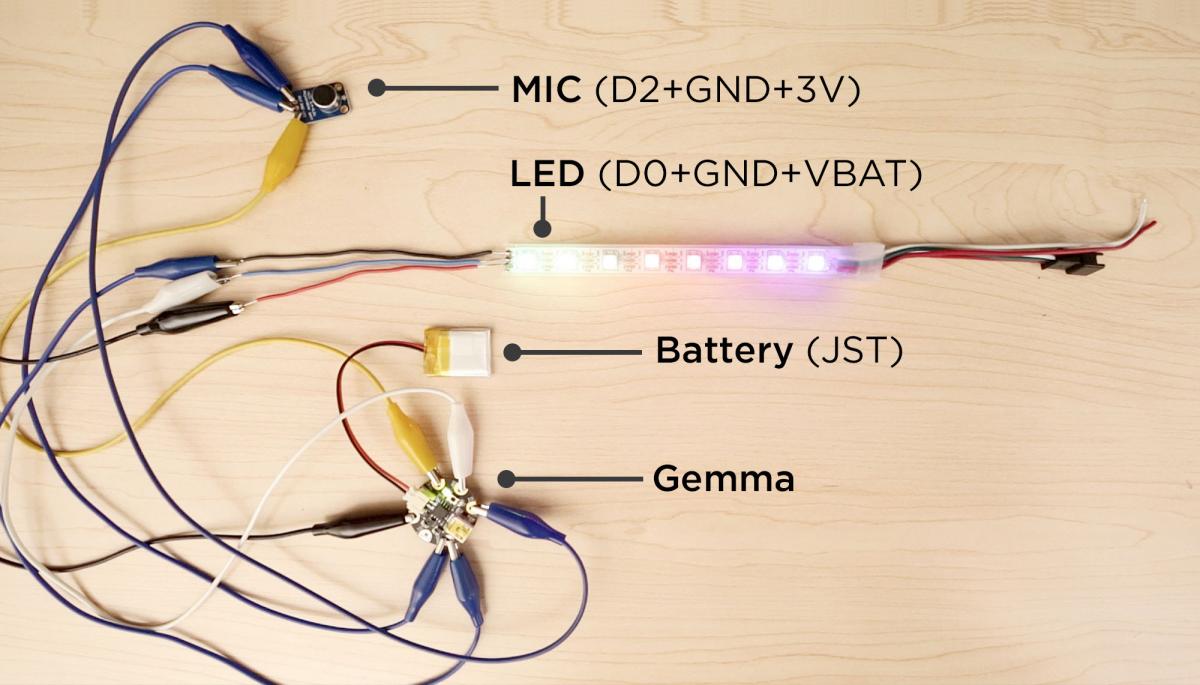
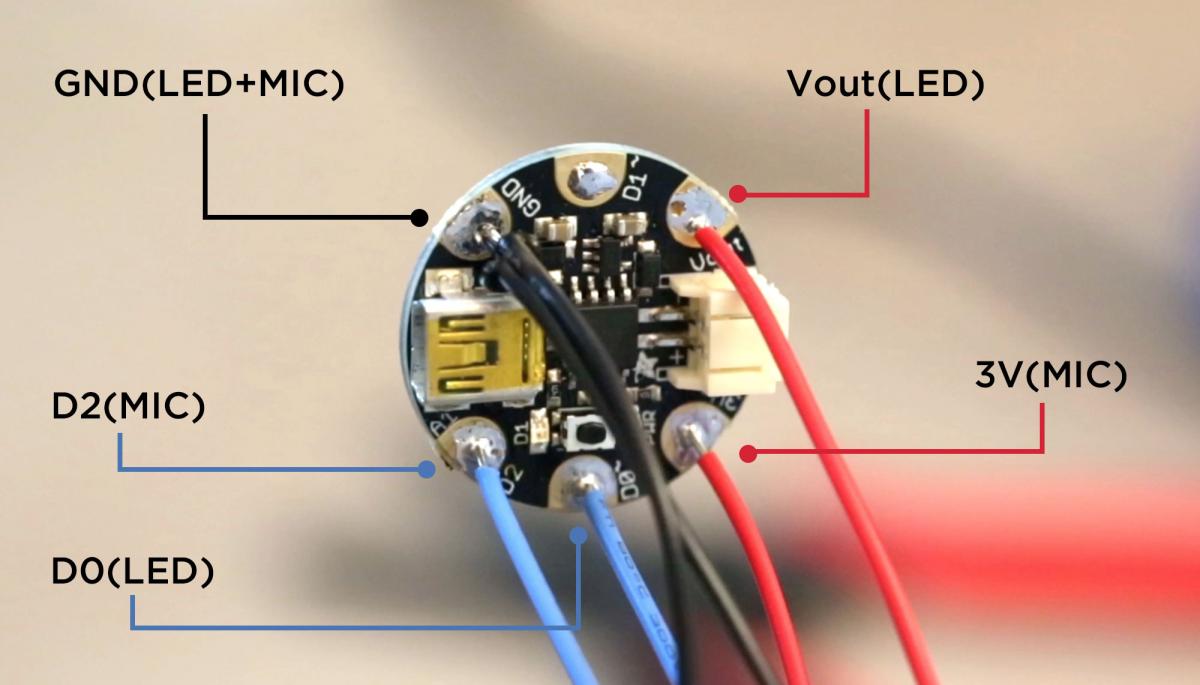
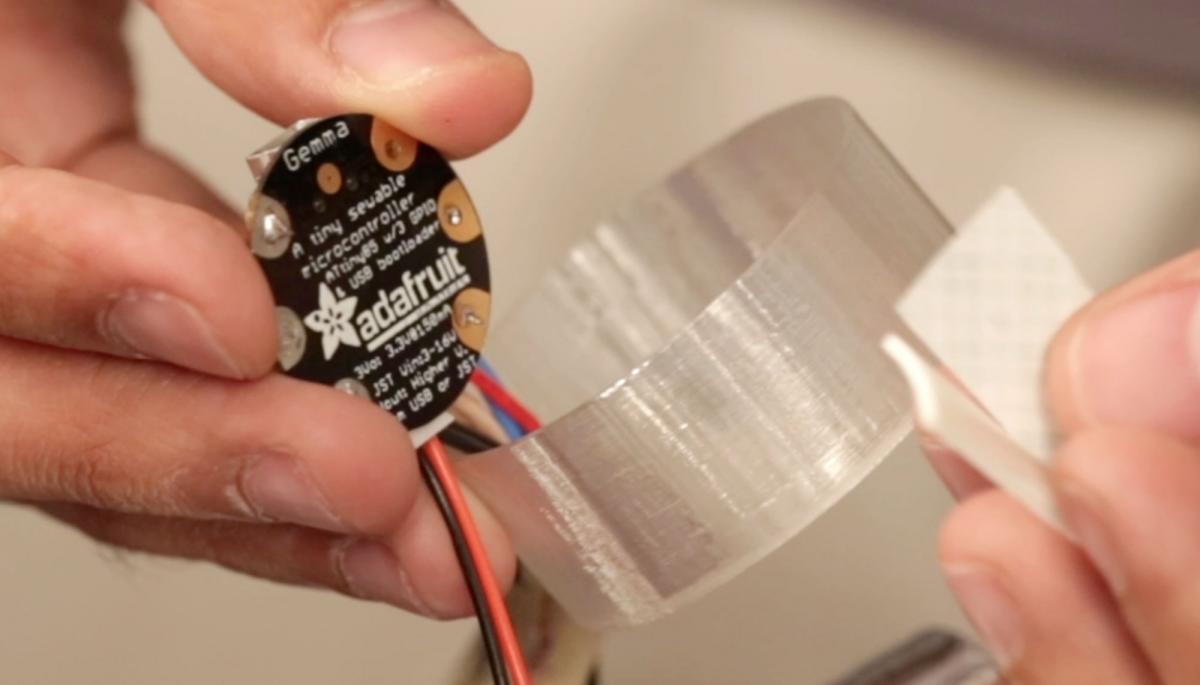
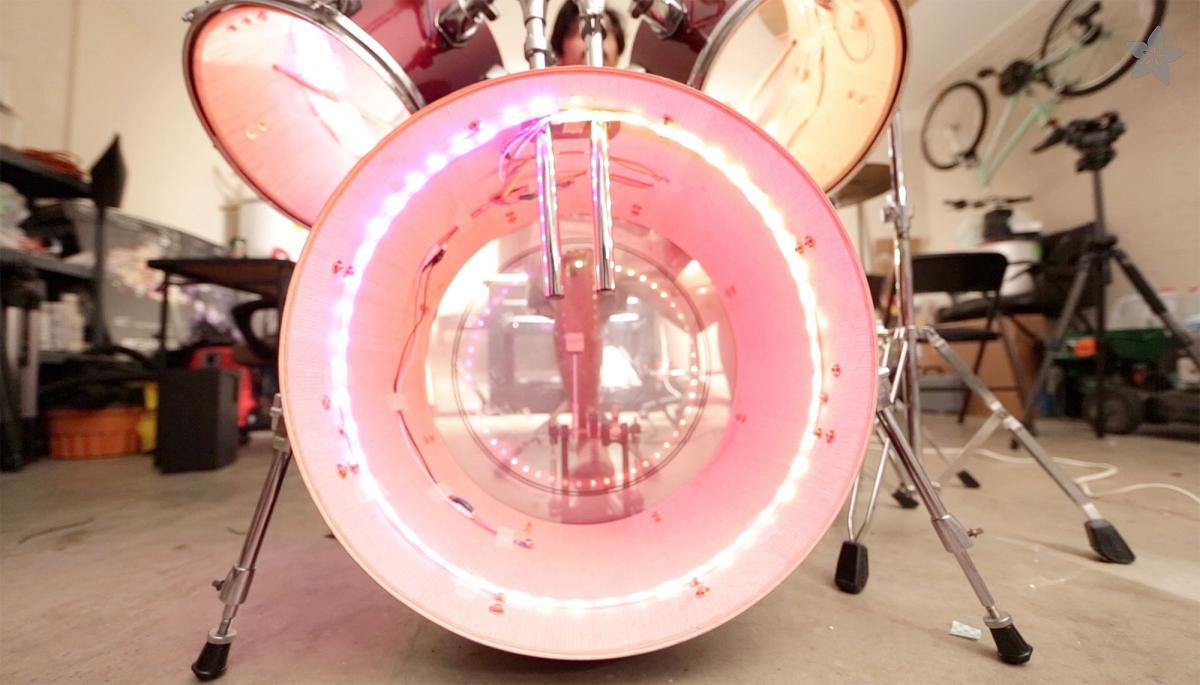
Цветомузыка - барабаны со светодиодной подсветкой Зажгите свои барабаны от звука ударов. Это руководство поможет вам обновить ваши барабаны, чтобы получить надежную динамическую светодиодную подсветку. Этот проект использует микрофон в качестве датчика и контроллер Gemma, чтобы заставить светодиоды NeoPixels работать в такт барабанов. Стоимость этого проекта значительно ниже, чем других проектов. Он очень компактен, и может работать от небольших аккумуляторов! Мы сделали сборку для малого барабана, среднего, и большого ударного. Каждый барабан не зависит друг от друга, но если звук от соседнего барабана достаточно громкий, то соседние барабаны тоже могут на него реагировать, что смотрится весьма не плохо. Наш проект обойдется в треть цены других предлагаемых наборов для ударных барабанов на рынке! Есть другие пособия, которые используют элемент «Piezo» и несколько дополнительных компонентов (конденсаторы, резисторы, таймеры, и т.д.), но наше пособие позволяет намного легче достичь успеха при довольно низкой стоимости компонентов, микроконтроллеров, датчиков и светодиодов. Перед выполнением проекта, настоятельно рекомендуем вам, ознакомится с инструкциями по работе со следующими компонентами: NeoPixel: http://learn.adafruit.com/adafruit-neopixel-uberguide Adafruit Gemma: http://learn.adafruit.com/introducing-gemma Для выполнения проекта вам понадобятся: Барабанная установка Микроконтроллер Gemma Мини микрофон Мини переключатель Литиево-полимерный аккумулятор Светодиодная лента NeoPixel Необходимый инструмент для пайки и сборки 3D – принтер (если имеется) На схеме ниже представлен общий принцип соединения элементов: Цифровой вход светодиодной ленты NeoPixel подключается к контакту «D0» на контроллере Gemma. Отрицательный полюс питания светодиодной ленты подключается к контакту «GND», положительный подключается к контакту «Vout» (только не к 3vo). Микрофон подключается к контактам A1/D2 на контроллере Gemma – это аналоговый вход контроллера. Питание на микрофон подается с контакта «3vo» с контроллера. Контроллер Gemma выполняет функцию регулятора напряжения, преобразуя напряжение батареи в постоянные 3.3V для питания микрофона, в то время как светодиоды питаются от 5V. Соответственно контакт «GND» является общим для обоих напряжений. Перед полной пайкой вашей схемы, рекомендуем собрать проверочную схему по принципу быстрой сборки: После сборки вашей схемы, нужно произвести программирование. Контроллер Gemma программируется через USB при помощи программы Arduino IDE. Вы можете изменять и настраивать код, чтобы программа соответствовала вашей схеме. Для начала, мы можем легко изменить количество выходов и количество светодиодов. В нашей установке, каждый барабан используется 60 светодиодов NeoPixels. Ознакомиться с руководством по работе с программой Arduino IDE можно по ссылке: http://learn.adafruit.com/introducing-gemma/setting-up-with-arduino-ide О том, как изменить цвета в зависимости от частоты звука, можно узнать из этого описания: http://learn.adafruit.com/adafruit-neopixel-uberguide/arduino-library Оригинальный программный код Процесс сборки всей барабанной установки В нашем проекте мы использовали 3D – принтер для изготовления акрилового корпуса, в котором мы расположили микрофон и собственно сам контроллер Gemma. Так как он у нас был в наличии, то для нас это проблем не составило. Если же вам проблематично получить доступ к нему, то вы можете придумать что-нибудь свое подходящее для размещения этих компонентов. На всякий случай файл с 3D-моделью корпуса: LED_Drum_Case_for_Gemma.zip Суть сборки заключается в том, что изготовленный корпус, вместе с установленным микрофоном, контроллером Gemma, выключателем и батареей устанавливаются на специальном кронштейне в районе вентиляционных отверстий снаружи барабана. Внутрь барабана помещаются только светодиодные ленты NeoPixel. Поэтапная сборка установки хорошо показана на фотографиях ниже: На этом процесс сборки заканчивается. Литиевые батареи легко можно снять для подзарядки. Нашей батареи хватает примерно, на час, но вы можете использовать и более мощные. Источник: adafruit








-
Темы
-
- 0 replies
- 70 views
-
- 1 reply
- 1,425 views
-
Lineare LED Beleuchtung ~ Linear Lichtsysteme • Design-Lichtlinien
By LEDWORKS Licht Manufaktur, in (DE) FORUM BELEUCHTUNG
- lineare beleuchtung
- led linear
- (and 11 more)
- 29 replies
- 19,618 views
-
- 1 reply
- 2,045 views
-
- 2 replies
- 2,610 views
-
Помогите узнать название покрытия защитного стекла на галогеновой лампочке. В идеале что за лампа?
By Vladimir Kuznetsov, in (RU) ФОРУМ ОСВЕЩЕНИЕ
- 0 replies
- 1,125 views
-
Подскажите насчёт ультрафиолетовой декоративной подсветки для шкафчика
By Vladimir Kuznetsov, in (RU) ФОРУМ ОСВЕЩЕНИЕ
- 0 replies
- 2,016 views
-
- 0 replies
- 35,728 views
-
- 1 reply
- 15,922 views
-
Unleashing the Captivating Charm: SK6812 RGB LED Strip Transforms KTV Experience
By Anna, in (EN) FORUM LIGHTING
- 2 replies
- 4,217 views
-
Как освещение влияет на здоровье человека?
By Decorator, in (RU) ФОРУМ ОСВЕЩЕНИЕ
- освещение в спальне
- освещение в гостиной
- (and 2 more)
- 4 replies
- 7,766 views
-
- 0 replies
- 6,306 views
-
- 0 replies
- 2,681 views
-
- 2 replies
- 19,547 views
-
Подключение светодиодного светильника SWIT S-2630 без контроллера
By type49, in (RU) ФОРУМ ОСВЕЩЕНИЕ
- 0 replies
- 1,280 views
-
- 0 replies
- 3,746 views
-
- 0 replies
- 3,452 views
-
- 0 replies
- 12,381 views
-
- 0 replies
- 2,642 views
-
- 1 reply
- 19,699 views
-
Помогите с расчетом необходимого количества светильников
By Евгения Пономарева, in (RU) ФОРУМ ОСВЕЩЕНИЕ
- 0 replies
- 4,347 views
-
- 3 replies
- 5,869 views
-
- 1 reply
- 10,422 views
-
Яркая подсветка самоката своими руками | Подсветка для электросамоката
By Tamik, in (RU) ФОРУМ ОСВЕЩЕНИЕ
- 4 replies
- 26,528 views
-
- 1 reply
- 6,273 views
-
- 1 reply
- 3,387 views
-
Look at the LED Sets with Simple Operation & Various Effects
By BTF-LIGHTING, in (EN) FORUM LIGHTING
- 7 replies
- 3,617 views
-
- 17 replies
- 9,181 views
-
- 8 replies
- 8,324 views
-
- 7 replies
- 4,630 views
-
- 1 reply
- 5,545 views
-
- 16 replies
- 5,907 views
-
- 0 replies
- 2,381 views
-
DIY Leuchtendes Strichmännchen Kostüm selber machen | mit LED Licht | Halloween Kostüm | Tutorial
By Tim Ustrabowski, in (DE) FORUM BELEUCHTUNG
- 0 replies
- 2,787 views
-
- 0 replies
- 2,197 views
-
- 0 replies
- 2,130 views
-
- 0 replies
- 1,987 views
-
- 0 replies
- 2,248 views
-
Giant LED Tree Weaving! Tiny Whoop vs Mobula HD vs SQUIRT Footage comparison
By Steve Beatty, in (EN) FORUM LIGHTING
- 0 replies
- 2,005 views
-
Glowing Wire Wrap Necklace with LED Lights - Programmable, with USB Charging
By Mechanic, in (EN) FORUM LIGHTING
- 0 replies
- 2,387 views
-
- 0 replies
- 5,192 views
-
- 0 replies
- 2,769 views
-
- 7 replies
- 16,457 views
-
- 1 reply
- 2,479 views
-
- 0 replies
- 2,352 views
-
- 0 replies
- 2,270 views
-
Правильное освещение: от печали и вирусов - Светотерапия, лечение светом
By Platon, in (RU) ФОРУМ ОСВЕЩЕНИЕ
- освещение в гостиной
- освещение в прихожей
- (and 3 more)
- 5 replies
- 4,903 views
-
DIY - RINGS OF SATURN LED PENDANT LIGHT I LUSTRE PENDENTE ESPIRAL - HOW TO MAKE
By Recarga, in (BR) FÓRUM ILUMINAÇÃO
- 0 replies
- 3,164 views
-
Résidence étudiante Les Croisiers - Eclairage et installation électrique Électricité tournaisienne
By Geary Lewis, in (FR) FORUM ÉCLAIRAGE
- 0 replies
- 2,595 views
-
- 0 replies
- 5,028 views
-
























.thumb.jpg.aa8e0eb4465e724dc084cb403f62ed80.jpg)




















